


PASS, which stands for Personalized Automated Soccer texts System, is a Natural Language Generation system that automatically generates Dutch soccer reports using match statistics, such as the final score of the game and which players scored the goals. The interesting thing about PASS is that these reports can be tailored towards the fans of the clubs that participated in the match. PASS is furthermore also capable of writing neutral reports. However, PASS is still not perfect, as the generated reports do not quite resemble the reports written by actual human reporters. Therefore, the following research question came to mind: Can the automatic generation of Dutch soccer reports by the PASS system be improved?
At first, I did a study where I read a lot of reports generated by PASS and compared them to reports written by human reporters on the same fixtures. From this study, I found some notable differences between the reports, which I turned into concrete points on which the PASS system could be improved. Two of the biggest improvement points were that the mentioning of substitutions should be added to the reports and the way that players were referred to should be changed.
I then implemented these improvement points by changing the code of PASS, which was written in Python, such that these improvement points were visible in the outputted reports.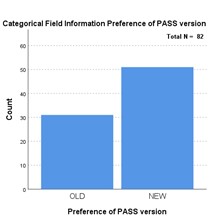
Then, in order to see whether PASS actually improved, I did an evaluation study. In this evaluation study, participants were asked, in an online survey, to read two reports on the same match. One of these reports was generated by the old version of PASS, and the other was generated by the new version of PASS. After reading the reports, the participant was asked to rate both texts on the readability, correctness, variety, and enjoyability of the text. Also, the participant was asked to state which of the 2 reports he or she preferred in general. In total, this survey was answered for 82 matches.
The results of this evaluation showed that the reports generated by the new version of PASS scored significantly higher on the ‘enjoyability’ criterium, but for the other three criteria, the ratings were similar for both versions of PASS. The general preference of the reports, however, was again significantly in favor of the reports from the new version of PASS. Therefore, the conclusion was drawn that PASS had been improved due to these new implementations.

Petroleum, also called crude oil, is a naturally occurring liquid found beneath the earth’s surface that can be refined into fuel. It is used to make gasoline, an important product in our everyday lives, and can be processed to make thousands of different items. Petroleum is, however, a non-renewable energy source and releases toxic gasses and carbon dioxide which contribute to environmental pollution. Therefore, sustainable alternative fuel sources are becoming increasingly apparent.
Pyrolysis oil, also known as bio-crude or bio-oil, is the liquid product from biomass pyrolysis and is a promising alternative. Unluckily, this bio-oil has a high content of acidic and oxygenated species, like aldehydes and ketones. This is the primary difference between bio-oils and crude oils. The high oxygen content leads to a lower energy density than conventional fuels and, together with the strong acidity, makes them extremely unstable.
To remove the oxygen from the pyrolysis oil, an electrochemical cell will be used, see the figure, in which the acids will be removed by selective oxidation at the anode. In this selective oxidation, carboxylic acids are converted in a so-called Kolbe oxidation to form alkanes and carbon dioxide gas. The protons and electrons generated at the anode can be applied to reduce protons to hydrogen gas.
In this assignment, the Kolbe oxidation of a bio-oil model was studied. Acetic Acid and Propionic Acid, the model components, were oxidized in a model solution to gain a fundamental understanding of the product formation at the anode side. When a mixture of these components is used in Kolbe electrolysis, the radicalization of these deprotonated acids will result in a variety of different hydrocarbon radicals. When these radicals react with each other, they will form a mixture of various alkanes which can be used in further processes and reactions.
Reaction conditions that influence the yield and selectivity of the Kolbe reaction are the current density, the concentration of the carboxylic acid, and the pH. This research aimed to determine the influence of these different reaction conditions on the product selectivity in Kolbe electrolysis.
To determine this influence, four different measurement sets were executed. The exact influence of these conditions were not determined, as more measurements for this need to be done. However, the results suggest that the carboxylic acid concentration or the current density have more influence than the pH.
In the medical field often dry-shippers are used to transport medical samples. A dry-shipper is a container filled with liquid nitrogen to cool the medical samples. For safety reasons, the liquid nitrogen is absorbed in a porous material to prevent a possible spillage. The time needed to absorb the liquid nitrogen into the porous material in a standard container is impractically long, i.e. 12 hours. The absorption speed of liquid nitrogen is hoped to increase when filling the dry-shipper with sub-cooled nitrogen. Therefore, I did research into a novel sub-cooling method for the Applied Thermal Science group. Sub-cooling is the cooling of a liquid below its saturation or boiling temperature; as indication, the boiling temperature of nitrogen is 77 K (-196 Celsius).
The novel sub-cooling device is shown a schematic in the figure. In this method, a heat exchanger with an orifice is immersed in an open container filled with the liquid nitrogen. By creating a vacuum inside the tube, nitrogen will flow through the orifice. Due to the quick transition in pressure, the liquid nitrogen turns into part solid and part vapour at a much lower temperature, also called the Joule-Thomson process. The nitrogen inside the tube will subsequently cool down the remaining liquid nitrogen in the container. I found out that this method indeed works as intended, even though there is still room for improvement.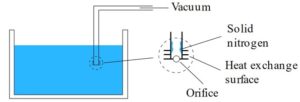
In my opinion, lab work is the best thing there is. It is in the lab where you find out that your theoretical prediction is correct or not. If you find what you expect, great! When it doesn’t turn out to be what you expected, there is a challenge to determine what is actually happening. This can be quite a challenge since you often have to deduce what you want to know from several parameters. But remember; research is not a bed of roses, but when you do succeed it feels all the better.
 The development and further improvement of exoskeleton robots is an increasing field of research. One of the exoskeleton robots that is participating in this research is the Symbitron exoskeleton developed by the University of Twente. The exoskeleton has at this moment no perception of the environment. Information of the environment would be useful for footstep planning and object avoidance. Therefore it is desired to have a method that can be used to map the environment and simultaneously determine the exoskeletons position and orientation in that map. A device that can be used to create such a method is a stereovision camera.
The development and further improvement of exoskeleton robots is an increasing field of research. One of the exoskeleton robots that is participating in this research is the Symbitron exoskeleton developed by the University of Twente. The exoskeleton has at this moment no perception of the environment. Information of the environment would be useful for footstep planning and object avoidance. Therefore it is desired to have a method that can be used to map the environment and simultaneously determine the exoskeletons position and orientation in that map. A device that can be used to create such a method is a stereovision camera.
A stereovision camera is a camera that makes use of two or more lenses. This gives the camera the possibility to mimic how the human eyes use binocular vision to perceive depth.
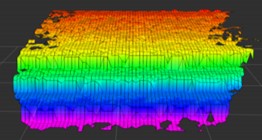
The depth information can be used to determine the location of the different pixels in the image of the environment and create a pointcloud of this information.
The goal of my thesis was to investigate, implement and evaluate an elevation mapping method for integration in a robotic exoskeleton using a stereovision camera. After a literature investigation the results of that research where used to do a literature review of different open-source methods that can be used to create the wanted environmental perception from the information provided by the stereovision camera.
By using a combination of different open-source methods a framework was created for the processing of the information provided by the stereovision camera. This framework creates a map of the environment and tracks the location of the camera in that map. Beside this the framework processes the pointcloud information to an addressable 3D structure. The 3D structure is again mapped to a 2D elevation map that subsequently can be used for footstep planning.
With the implemented solution it is therefore possible to map the environment and simultaneously determine the exoskeletons pose in that map.

 In compliant manipulators the conventionally used bearings in the joints are replaced by flexible elements. Due to the absence of the bearings there is hardly any friction in the mechanism, which enables them to perform tasks in the high precision industry. A picture of the compliant manipulator that I used for my Bachelor assignment can be seen in the pictures below in which the flexible joints as well as the two actuators and the end-effector are highlighted. The accuracy of compliant manipulators also introduces the possibility to control the force exerted at the end-effector without using a force sensor in a feedback control loop. Those sensors are usually bulky and limit the bandwidth of the controller due to their compliance. Therefore, if the dynamics, so the parameters like the mass and damping terms as well as the stiffness of the flexible elements are known precisely, sensorless force control is a promising control method.
In compliant manipulators the conventionally used bearings in the joints are replaced by flexible elements. Due to the absence of the bearings there is hardly any friction in the mechanism, which enables them to perform tasks in the high precision industry. A picture of the compliant manipulator that I used for my Bachelor assignment can be seen in the pictures below in which the flexible joints as well as the two actuators and the end-effector are highlighted. The accuracy of compliant manipulators also introduces the possibility to control the force exerted at the end-effector without using a force sensor in a feedback control loop. Those sensors are usually bulky and limit the bandwidth of the controller due to their compliance. Therefore, if the dynamics, so the parameters like the mass and damping terms as well as the stiffness of the flexible elements are known precisely, sensorless force control is a promising control method.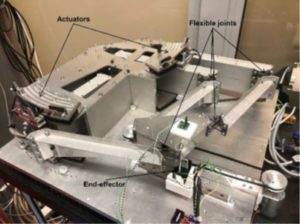
There has already been previous work on the sensorless force control but only in the static 1-DOF situation. I decided to extend this research and investigate the force control in the 2-DOF situation as well as the control of the force during motion of the end-effector of the manipulator.
To be able to control the force in two directions at the end, various steps had to be done. It started by coming up with system identification techniques which were required to determine the system’s parameters. In addition to that a kinematic relation between the end-effector forces and the forces exerted by the two actuators of the system had to be determined. The force control scheme was found in literature and required some adjustment as well as it did not include any damping and stiffness terms, which were present in the manipulator that I used. To be able to control the force during motion as well I designed a linear guidance system which was velocity controlled by a PID controller.
I chose this topic since system dynamics as well as control theory were the two parts that I liked the most during the three years of Advanced Technology. I really enjoyed every part of the assignment, from the modelling of a 2-DOF planar robot and its control as well as some design and also building (the linear guidance). A lot of the theory required to do this thesis was already known from the courses I did in AT.
 Recently, micro and nanorobots have been identified as promising tools for medical applications. The robots need a small-scale power supply which is currently achieved by electric leads or small storage systems. These ways to provide power are undesirable as power can run out and wires limit accessibility. A possible solution is a light-driven system. One idea to achieve this is by combining solar cells and piezoelectric materials, which convert the electricity generated by the solar cell directly into mechanical motion. A spectral selectivity can be added by using colour filters to obtain full control over the motion of the robot.
Recently, micro and nanorobots have been identified as promising tools for medical applications. The robots need a small-scale power supply which is currently achieved by electric leads or small storage systems. These ways to provide power are undesirable as power can run out and wires limit accessibility. A possible solution is a light-driven system. One idea to achieve this is by combining solar cells and piezoelectric materials, which convert the electricity generated by the solar cell directly into mechanical motion. A spectral selectivity can be added by using colour filters to obtain full control over the motion of the robot.
In an earlier study, solar-driven piezoelectric elements were fabricated using the piezoelectric material lead zirconate titanate (PZT) and a silicon solar cell. The system was tested and showed that the displacement of the piezoelectric layer was dependent on the frequency of the light.
In my bachelor assignment, I investigated the frequency-dependent behaviour by measuring the voltage on top of the solar cell together with measuring the displacement of the PZT layer. Using this, the source of the frequency-dependent behaviour can be identified to optimize the device. During the assignment, I performed different experiments using the techniques of atomic force microscopy to measure the displacement and Kelvin probe force microscopy to measure the voltage. These techniques, usually, give only space-dependent data, but by using the velocity of the probe, I converted this to time-resolved data, such that I could see the behaviour of the solar-driven piezoelectric device when changing the light intensity from high to low at a certain frequency.
Eventually, I found out that the cause of the frequency-dependent behaviour is probably a high contact resistance between the solar cell and the electrode. Some of my findings are included in a scientific paper: Investigation of the dynamic properties of on-chip coupled piezo/photodiodes by time-resolved atomic force and Kelvin probe microscopy, by Rebecca Saive.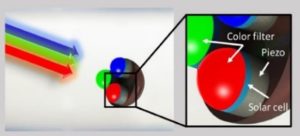
During the assignment, I have learned a lot about doing research and I have used a lot of knowledge I gained during the courses of AT. Therefore, it was a nice ending to my bachelor’s in Advanced Technology.

Diploma
Students receiving their diploma during the bachelor’s graduation ceremony

Diploma
Students receiving their diploma during the bachelor’s graduation ceremony

Diploma
Students receiving their diploma during the bachelor’s graduation ceremony

Diploma
Students receiving their diploma during the bachelor’s graduation ceremony